导语
没有目标的智能体只能被动响应,不知道要实现什么,也无法评估进度。目标设定与监控通过SMART原则定义可衡量目标,建立持续跟踪机制,创建反馈循环,让智能体从被动响应转变为主动、目标驱动的系统。本文介绍SMART目标设计、监控机制实现、AI代码生成智能体案例与ADK实现,适合需要构建自主智能体的开发者。
TL;DR
- 核心:目标设定与监控是为智能体明确定义可衡量目标,并建立持续跟踪进度的监控机制,创建反馈循环使智能体能够自我评估、纠正路线并适应变化。
- 价值:使智能体能够自主处理多步骤复杂任务,在动态条件下适应并调整策略,可靠实现特定高层次目标,减少人工干预需求。
- 机制:明确目标(SMART原则)→ 持续监控(观察行动、环境状态、工具输出)→ 反馈循环(评估→纠正→适应→升级)。
- 实践:通过智能体指令传达目标,状态管理实现监控,工具返回值更新状态并调整策略。
- 边界:简单任务不需要目标设定,单步简单任务直接执行即可;目标设定适用于多步骤复杂任务。
是什么:目标设定与监控的核心定义
目标设定与监控(Goal Setting and Monitoring):为智能体明确定义可衡量的目标,并建立持续跟踪进度的监控机制,创建反馈循环使智能体能够自我评估、纠正路线并适应变化。
核心类比:
计划旅行 → 目标设定与监控
- 决定目的地 = 定义目标状态
- 起点 = 初始状态
- 规划路线 = 制定计划
- 导航跟踪进度 = 监控机制
- 根据路况调整 = 反馈循环关键机制:
- 明确目标:具体、可测量、可实现、相关、有时限(SMART)
- 持续监控:观察行动、环境状态、工具输出
- 反馈循环:评估→纠正→适应→升级
常见误解澄清:
- ❌ 所有任务都需要目标设定:简单任务不需要,单步简单任务直接执行即可。
- ❌ 目标设定就是规划:规划侧重于制定达成目标的步骤序列,目标设定侧重于定义目标+监控进度+反馈调整。
- ❌ LLM自我评判完全可靠:存在局限性,建议分离角色(评审者≠创建者),使用客观指标验证。
为什么:产生背景与适用场景
产生背景
无目标设定的问题:
- 缺乏方向:智能体不知道要实现什么
- 无法评估进度:不知道是否朝目标前进
- 无法自我纠正:遇到问题不会调整策略
- 只能被动响应:仅能执行单步简单任务
目标设定与监控的优势:
- ✅ 使智能体能够自主处理多步骤复杂任务
- ✅ 在动态条件下适应并调整策略
- ✅ 可靠实现特定高层次目标
- ✅ 减少人工干预需求
典型应用场景
场景 1:客户支持自动化
目标:"解决客户账单查询"
监控:对话状态、数据库查询、账单调整确认
成功标准:账单已修改 + 客户反馈积极
失败处理:未解决则升级到人工场景 2:AI代码生成智能体
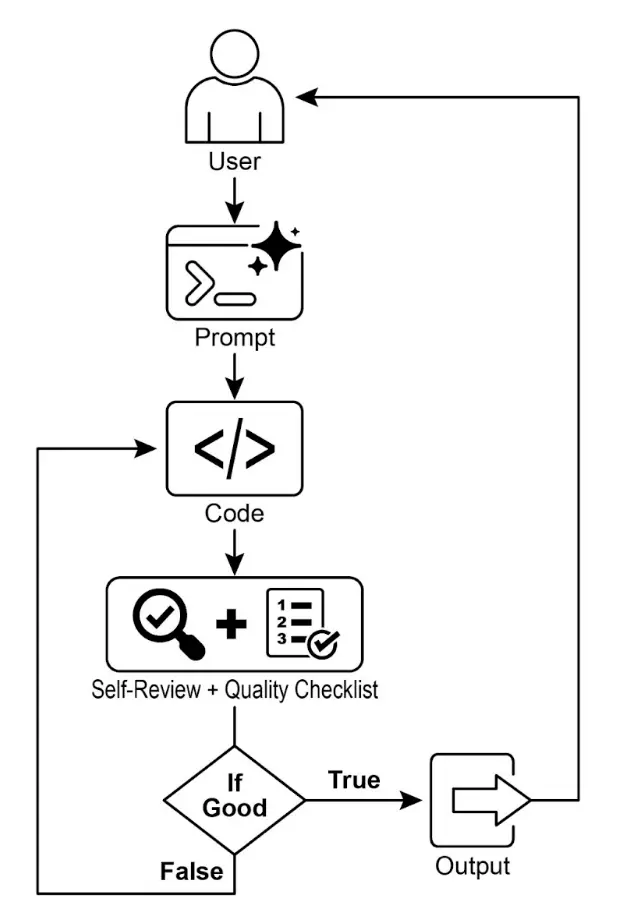
目标:接受代码问题 + 质量目标列表(简单、正确、处理边界情况)
迭代循环:
1. 生成代码
2. 自我评审(与目标对比)
3. LLM判断:目标达成? True/False
4. 未达成 → 根据反馈优化代码 → 继续迭代
5. 达成 → 输出最终代码
最大迭代:5次(防止无限循环)价值:自动化代码生成,确保代码质量。
怎么做:SMART目标设计与实战实现
设计原则(SMART目标)
| 原则 | 含义 | 示例 |
|---|---|---|
| Specific | 具体明确 | "解决客户账单问题"而非"改善客户体验" |
| Measurable | 可衡量 | "准确率>95%"而非"提高准确率" |
| Achievable | 可实现 | 考虑智能体能力和资源限制 |
| Relevant | 相关 | 与整体任务目标一致 |
| Time-bound | 有时限 | "30分钟内完成"而非"尽快完成" |
监控关键要素:
- ✅ 明确定义成功指标
- ✅ 观察智能体行动
- ✅ 跟踪环境状态变化
- ✅ 记录工具输出结果
- ✅ 建立反馈循环机制
实战示例:AI代码生成智能体
核心机制
目标设定:接受代码问题 + 质量目标列表(简单、正确、处理边界情况)
迭代循环:
1. 生成代码
2. 自我评审(与目标对比)
3. LLM判断:目标达成? True/False
4. 未达成 → 根据反馈优化代码 → 继续迭代
5. 达成 → 输出最终代码
最大迭代:5次(防止无限循环)关键函数
| 函数 | 作用 |
|---|---|
| <code>generate_prompt()</code> | 构建代码生成提示词,包含目标和之前代码 |
| <code>get_code_feedback()</code> | LLM评审代码是否满足目标 |
| <code>goals_met()</code> | LLM判断目标是否达成(返回True/False) |
| <code>clean_code_block()</code> | 清理Markdown格式代码块 |
| <code>save_code_to_file()</code> | 保存最终代码到.py文件 |
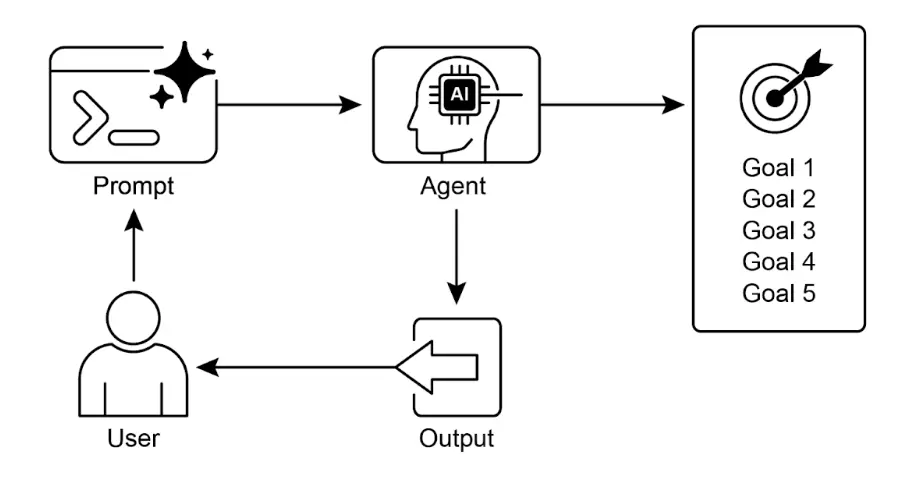
工作流程
用户输入
↓
提交问题简报 + 质量检查清单
↓
AI程序员生成初稿
↓
自我审查(对比目标)
↓
评判:True or False
↓
False → 修订阶段(利用反馈优化)→ 回到初稿
↓
True → 添加注释头部 → 保存到文件⚠️ 警告与注意事项
-
LLM局限性:
- 可能误判目标达成
- 可能产生幻觉代码
- 自写自判容易陷入错误方向
-
监控不足:
- 示例中的监控较简单
- 存在无限循环风险
- 需要人工测试最终代码
-
改进方向:
- 分离角色:使用多智能体系统
- 程序员同伴:编写代码
- 代码评审员:发现错误
- 文档编写员:生成文档
- 测试编写员:创建单元测试
- 提示词优化员:优化AI交互
- 增强监控:更严格的质量检查机制
- 分离角色:使用多智能体系统
ADK中的实现
Google ADK方式
| 维度 | 实现方式 |
|---|---|
| 目标传达 | 通过智能体指令(<code>instruction</code>参数) |
| 监控实现 | 状态管理(<code>session.state</code>)+ 工具交互 |
| 反馈循环 | 工具返回值 → 更新状态 → 调整策略 |
示例伪代码:
agent = LlmAgent(
name="customer_support_agent",
model="gemini-2.0-flash",
instruction="""
目标:解决客户账单查询
监控指标:
- 对话状态:客户满意度
- 数据库:账单状态变化
- 工具输出:操作确认
成功标准:账单已更新 AND 客户确认满意
失败处理:3次尝试未解决则升级人工
""",
tools=[database_query, update_billing, escalate_to_human]
)对比与取舍:目标设定与规划的区别
目标设定 vs 规划
| 维度 | 规划 | 目标设定 |
|---|---|---|
| 侧重点 | 制定达成目标的步骤序列 | 定义目标+监控进度+反馈调整 |
| 关系 | 规划是目标设定的执行层面 | 目标设定是规划的前提和基础 |
| 应用 | 如何做 | 做什么+做得怎么样 |
实际应用:目标设定与规划通常结合使用,目标设定定义"做什么",规划制定"怎么做"。
常见错误与排错
典型坑位
| 问题 | 症状 | 识别方法 | 修复建议 |
|---|---|---|---|
| 目标不明确 | 智能体不知道要实现什么 | 检查目标描述是否具体 | 使用SMART原则定义目标 |
| 无法评估进度 | 不知道是否朝目标前进 | 检查监控机制 | 建立明确的成功指标 |
| 无限循环 | 智能体不断迭代无法停止 | 检查停止条件 | 设置最大迭代次数和失败退出条件 |
| LLM误判 | 自我评判不准确 | 检查评判逻辑 | 分离角色,使用客观指标验证 |
调试技巧
- 明确目标描述:使用SMART原则,确保目标具体、可衡量。
- 建立监控机制:观察行动、环境状态、工具输出。
- 设置停止条件:最大迭代次数、失败退出条件、人工干预机制。
- 分离角色:评审者≠创建者,避免认知偏见。
FAQ
Q1:目标设定与规划模式有何区别?
A:
- 规划:侧重于制定达成目标的步骤序列
- 目标设定:侧重于定义目标+监控进度+反馈调整
- 关系:目标设定是规划的前提和基础
Q2:如何防止智能体陷入无限循环?
A:1) 设置最大迭代次数;2) 定义明确的失败退出条件;3) 引入人工干预机制;4) 监控资源消耗。
Q3:简单任务是否也需要目标设定?
A:不需要。单步简单任务(如"翻译这句话")直接执行即可,目标设定适用于多步骤复杂任务。
Q4:如何处理目标冲突?
A:
- 定义优先级层次
- 使用多目标优化算法
- 引入权衡决策机制
- 人工审核关键决策
Q5:LLM自我评判的可靠性如何?
A:存在局限性。建议:1) 分离角色(评审者≠创建者);2) 使用客观指标验证;3) 人工抽查审核;4) 多模型交叉验证。
Q6:监控频率如何确定?
A:取决于任务性质:
- 实时系统:持续监控
- 批处理:关键节点检查
- 长期任务:定期采样
延伸阅读与引用
相关理论
总结
目标设定与监控是让智能体从被动响应转变为主动、目标驱动系统的核心能力。通过SMART原则定义可衡量目标,建立持续跟踪机制,创建反馈循环,智能体可以自主处理多步骤复杂任务,在动态条件下适应并调整策略。AI代码生成智能体案例展示了目标设定与监控在实际应用中的强大能力。虽然LLM自我评判存在局限性,但通过分离角色、客观指标验证和多智能体协作可以显著提升可靠性。