导语
告诉智能体“做什么”和“怎么做”,只能处理简单任务。规划(Planning)模式让智能体自主将复杂目标拆解为可执行步骤序列,动态调整策略,实现深度研究、流程自动化、客户支持等复杂场景。本文介绍规划的核心机制、深度研究系统对比、实战案例与设计原则,适合需要构建自主智能体的开发者与产品经理。
TL;DR
- 核心:规划是将复杂目标拆解为可执行步骤序列的能力,包含理解初始状态、定义目标状态、制定计划、执行步骤、动态调整五个环节。
- 价值:从被动响应转变为主动战略执行者,处理多步骤复杂任务,遇到障碍时动态调整策略。
- 机制:简单执行是“做什么+怎么做”,规划是只告诉“做什么”,智能体自己决定“怎么做”。
- 系统:Google DeepResearch(大规模网络研究)、OpenAI Deep Research API(编程控制)、Perplexity Deep Research(快速交互)。
- 边界:解决方法已知且可重复时用固定流程更好;需要探索“如何做”时用规划模式。
- 延伸:与工具使用、多智能体协作、目标监控配合使用。
是什么:规划的核心定义
规划(Planning):智能体将复杂的高层目标拆解为多个可执行的具体步骤,并按逻辑顺序执行这些步骤以实现目标的能力。规划使智能体从被动响应转变为主动战略执行者。
关键机制(五步流程):
1. 理解初始状态 → 明确当前情况和约束
2. 定义目标状态 → 明确要达成的结果
3. 制定计划 → 拆解为多个步骤
4. 执行步骤 → 按顺序完成各个子任务
5. 动态调整 → 遇到障碍时重新规划规划 vs 简单执行:
- 简单执行:你告诉智能体「做什么」和「怎么做」
- 规划:你只告诉「做什么」,智能体自己决定「怎么做」
可视化示意图:
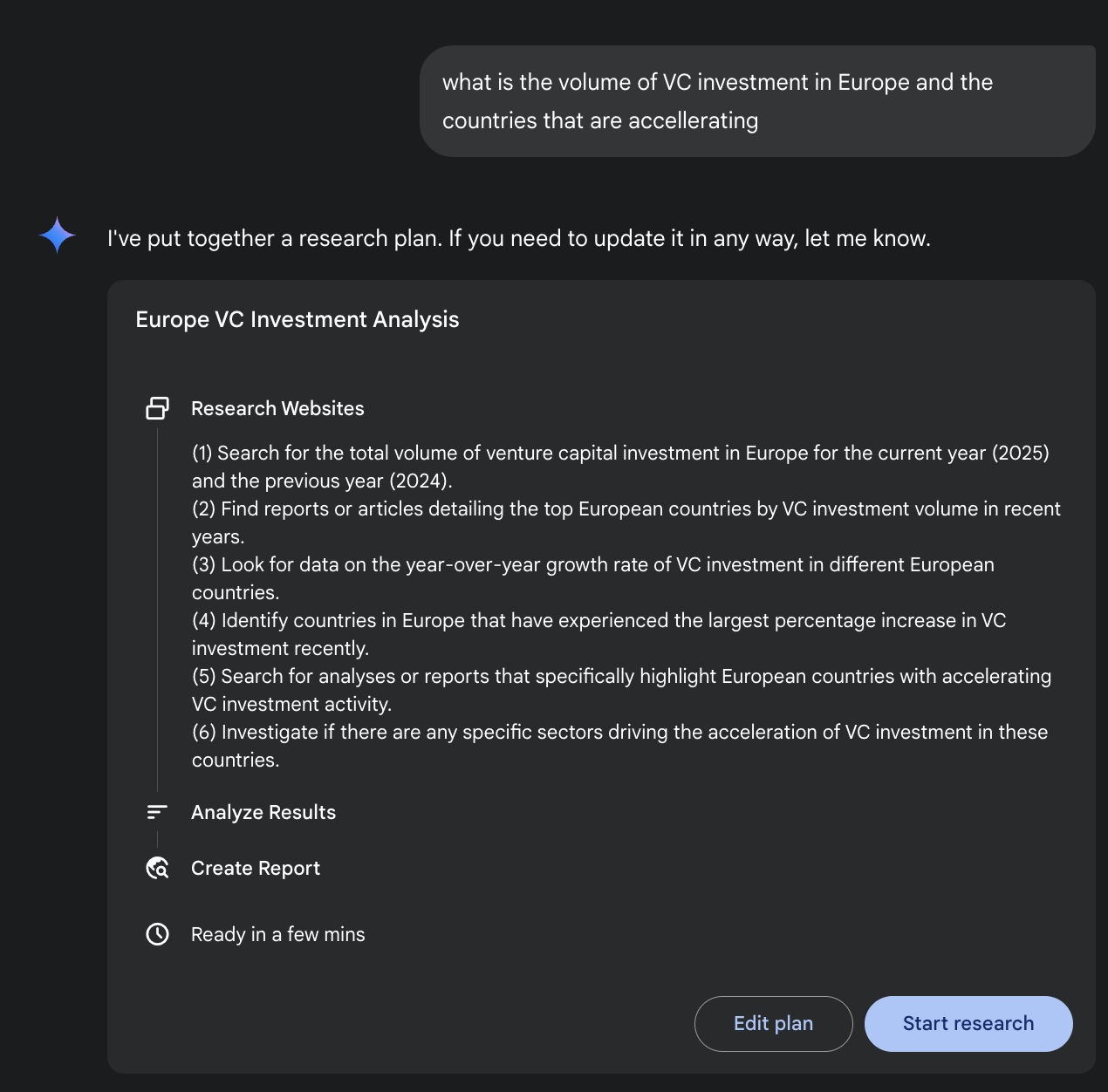
图1:Google 深入研究智能体使用 Google 搜索引擎作为工具,生成详细的执行计划
读图要点:智能体将研究任务拆解为多个子问题,并行搜索并整合结果。
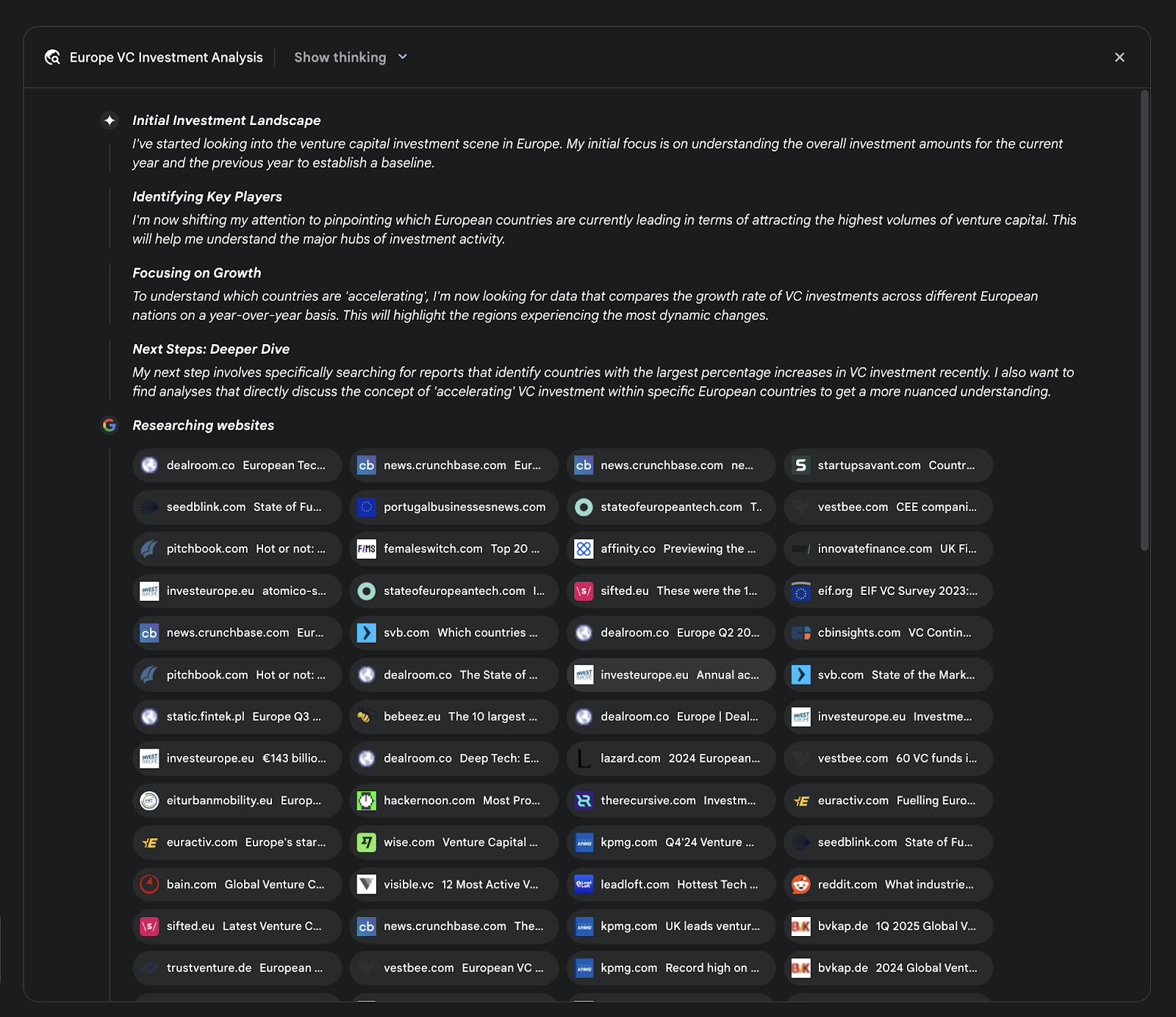
图2:深入研究计划执行示例 - 展示从问题拆解到最终报告的完整流程
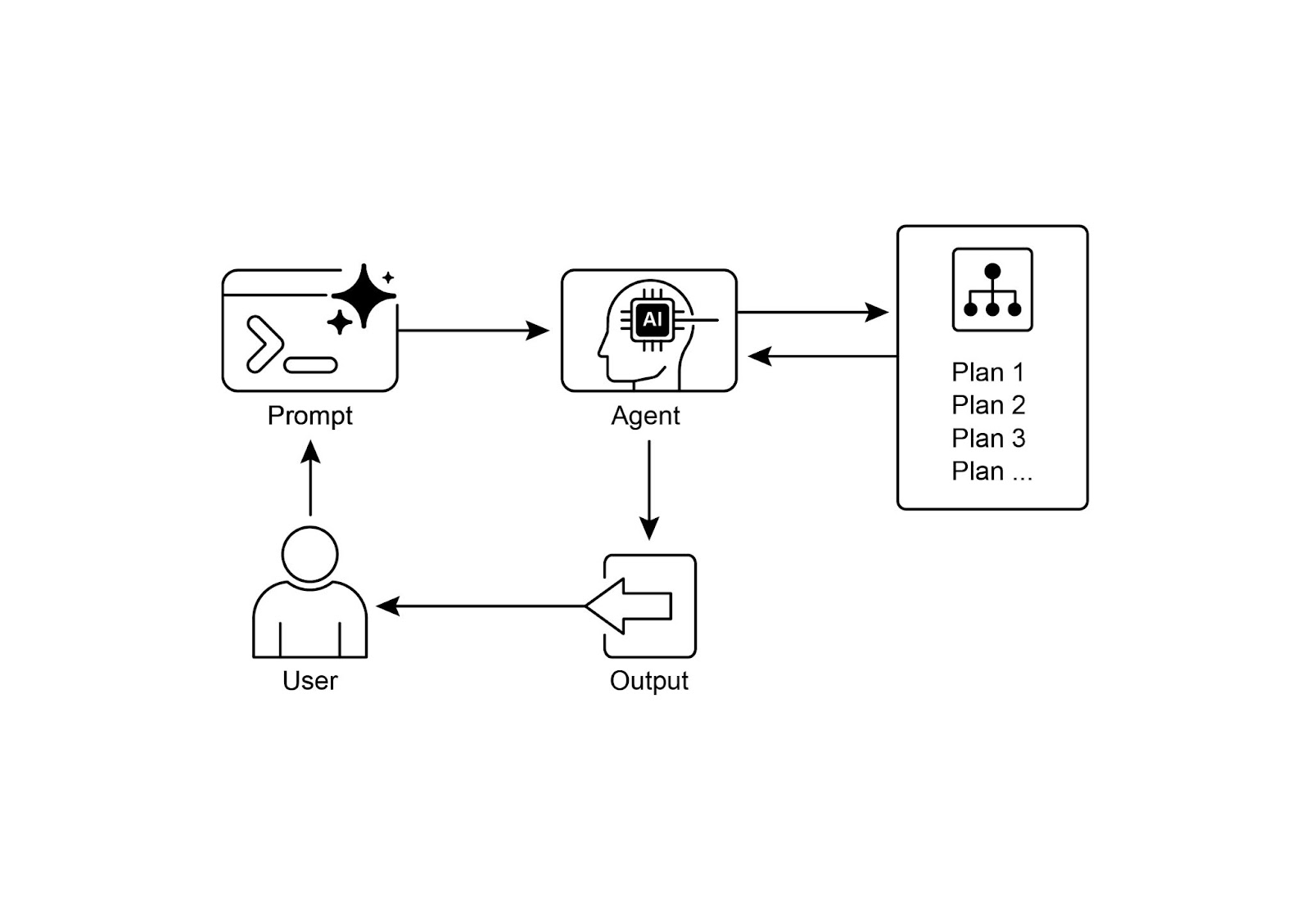
图3:规划设计模式 - 从初始状态到目标状态的路径规划
常见误解澄清:
- ❌ 规划就是列出步骤:规划包含动态调整,遇到障碍时重新规划。
- ❌ 所有任务都需要规划:简单单步骤任务直接执行即可,规划适用于多步骤复杂任务。
- ❌ 规划会增加很多延迟:对复杂任务而言,有计划的执行通常比盲目尝试更高效。
为什么:产生背景与适用场景
产生背景
无规划的问题:
- 无法处理多步骤复杂任务:单次调用无法完成需要多步推理的任务。
- 遇到障碍就失败:无法动态调整策略,找替代方案。
- 只能被动响应:缺乏主动制定策略的能力。
- 难以管理依赖关系:无法按逻辑顺序处理任务依赖。
规划模式的优势:
- ✅ 拆解为可管理的小步骤
- ✅ 动态调整,找替代方案
- ✅ 主动制定策略
- ✅ 按逻辑顺序处理依赖
核心思想:先思考再行动,把「做什么」转化为「怎么做」。
关键权衡:灵活性 vs 可预测性
- 当解决方法已知且可重复 → 用固定流程更好
- 当需要探索「如何做」→ 用规划模式
典型应用场景
场景 1:流程自动化
问题:新员工入职需要多个步骤协调。
解决方案:
目标: 新员工入职
计划: 创建账户 → 分配培训 → 协调各部门 → 发放设备 → 完成入职价值:自动化复杂业务流程,减少人工干预。
场景 2:研究报告生成
问题:撰写竞品分析报告需要收集、归纳、结构化多个信息源。
解决方案:
目标: 撰写竞品分析报告
计划: 信息收集 → 数据归纳 → 结构化内容 → 迭代打磨 → 最终报告价值:系统化信息整合,提升报告质量。
场景 3:深度研究(核心案例)
问题:研究复杂主题需要拆解子问题、搜索来源、评估相关性、发现知识盲点。
解决方案:
目标: 研究复杂主题
计划: 拆解子问题 → 搜索来源 → 评估相关性 → 发现知识盲点 → 后续搜索 → 整合报告典型系统:Google DeepResearch、OpenAI Deep Research、Perplexity Deep Research。
价值:自动化原本需要数小时的人工研究。
怎么做:深度研究系统对比与实现
深度研究系统对比
| 系统 | 核心能力 | 特色功能 | 适用场景 |
|---|---|---|---|
| Google DeepResearch | 迭代搜索+整合 | 异步长时运行、可审阅计划 | 大规模网络研究 |
| OpenAI Deep Research API | 编程接口控制 | 透明中间步骤、MCP扩展 | 企业集成、私有数据 |
| Perplexity Deep Research | 实时交互式研究 | 快速响应、对话式 | 快速查询和验证 |
Google DeepResearch 特点
工作流程:
- 拆解用户提示为研究计划
- 用户审阅并修改计划
- 迭代搜索与分析循环
- 动态调整查询,发现知识盲点
- 整合为结构化多页报告
- 包含引用、图表、音频概述
关键优势:
- 处理数百个来源
- 异步执行,抗单点故障
- 整合私有文档
- 完整引用来源,透明可验证
OpenAI Deep Research API 特点
核心价值:
response = client.responses.create(
model="o3-deep-research-2025-06-26",
input=[system_message, user_query],
tools=[{"type": "web_search_preview"}]
)独特功能:
- 暴露所有中间步骤(推理、搜索、代码)
- 支持 MCP 连接私有知识库
- 内联引用与元数据
- 编程控制整个流程
实现要点
1. 清晰的目标定义:明确初始状态和目标状态
# 示例:定义研究目标
research_goal = {
"initial_state": "用户需要了解量子计算对密码学的影响",
"target_state": "生成一份包含最新研究、实际案例、未来趋势的综合报告",
"constraints": ["时间:2小时", "来源:学术论文+新闻"]
}2. 步骤拆解能力:LLM 擅长生成合理的计划
# 示例:规划步骤
plan = [
"步骤1:搜索量子计算最新进展",
"步骤2:查找密码学相关研究",
"步骤3:分析两者关联性",
"步骤4:评估实际影响案例",
"步骤5:预测未来趋势",
"步骤6:整合为报告"
]3. 动态调整机制:能根据执行结果修改计划
# 示例:动态调整
if search_results.empty():
# 发现知识盲点,调整搜索策略
plan.append("步骤7:使用不同关键词重新搜索")4. 依赖关系管理:按逻辑顺序执行
# 示例:依赖管理
dependencies = {
"步骤2": ["步骤1"], # 步骤2依赖步骤1完成
"步骤4": ["步骤2", "步骤3"],
"步骤6": ["步骤1", "步骤2", "步骤3", "步骤4", "步骤5"]
}对比与取舍:主流框架选型
框架对比表
| 框架 | 规划实现方式 | 特色 | 适用场景 |
|---|---|---|---|
| CrewAI | Agent 生成计划并执行 | 高层抽象,简单易用 | 快速原型,内容生成 |
| LangGraph | 显式定义规划节点 | 图结构,可视化 | 复杂多步骤工作流 |
| Google ADK | 结合工具的多步骤执行 | 与 Google 生态集成 | 企业级应用 |
选型建议
选择 CrewAI 如果:
- 需要快速原型开发
- 内容生成类任务
- 高层抽象足够
选择 LangGraph 如果:
- 需要可视化工作流
- 复杂状态转换
- 需要精确控制
选择 Google ADK 如果:
- 使用 Google Cloud 服务
- 企业级集成需求
- 需要异步长时运行
常见错误与排错
典型坑位
| 问题 | 症状 | 识别方法 | 修复建议 |
|---|---|---|---|
| 计划质量差 | 步骤不合理或遗漏 | 检查计划是否覆盖所有必要环节 | 清晰的目标描述,让用户审阅计划 |
| 无法动态调整 | 遇到障碍就失败 | 观察是否重新规划 | 设计重新规划机制 |
| 过度规划 | 步骤过多,效率低 | 检查步骤数量 | 设置最大步骤数限制 |
| 依赖关系混乱 | 步骤执行顺序错误 | 检查依赖关系 | 明确依赖关系,按顺序执行 |
调试技巧
- 让用户审阅计划:在 Google DeepResearch 中,用户可以审阅并修改计划。
- 验证每步结果:执行中验证每步结果,确保质量。
- 记录规划过程:记录规划决策过程,便于优化。
FAQ
Q1:规划会增加多少延迟?
A:会增加。需要先生成计划,再执行。但对复杂任务而言,有计划的执行通常比盲目尝试更高效。
Q2:如何确保计划质量?
A:1) 清晰的目标描述;2) 让用户审阅计划再执行(如 Google DeepResearch);3) 执行中验证每步结果。
Q3:计划失败怎么办?
A:设计重新规划机制。当某步失败时,智能体应能识别问题并生成替代计划。
Q4:规划适合实时场景吗?
A:不太适合。规划需要时间,更适合异步或批处理场景。实时场景用预定义流程更好。
Q5:如何避免过度规划?
A:设置最大步骤数限制,或在提示词中要求"简洁高效的计划"。
总结
规划是智能体从被动响应转变为主动战略执行者的核心能力。通过清晰的目标定义、合理的步骤拆解、动态调整机制和依赖关系管理,可以构建稳定、可扩展的规划系统。深度研究系统(Google DeepResearch、OpenAI API、Perplexity)展示了规划在实际应用中的强大能力。